文章圖片

文|高仙機器人
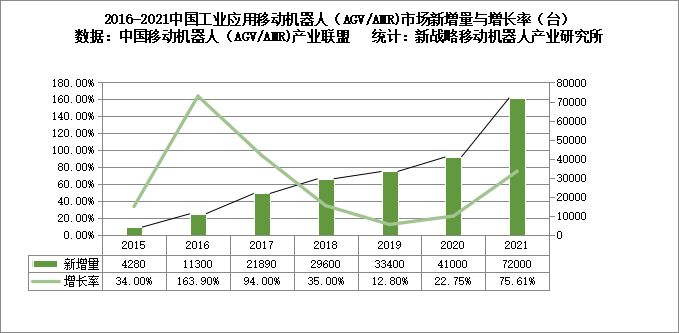
2021年 , 中國工業應用移動機器人(AGV)市場呈現出超預期的高速增長 , 據最新發布的《2021年度中國工業應用移動機器人產業發展研究報告》顯示 , 2021年度 , 中國市場企業整體銷售工業應用移動機器人72000臺 , 較2020年增長75.61% , 市場銷售額達到126億元 , 同比增長64% 。 圖表:2015-2021中國市場企業工業應用移動機器人(AGV/AMR)新增量(臺)與增長率AGV高速發展的背后 , 是適齡勞動力供給趨減的社會因素驅動 , 也是產業轉型升級、智能制造的必然要求 , 再疊加新冠疫情的催化作用 。 在工業場景 , 我們看到 , 不僅是AGV , 自主移動的清潔機器人也得到越來越廣泛的應用 , 助力提高工廠智能化水平 , 減少人工 。 相比人工清潔 , 機器人還能避免高粉塵、放射性等有毒有害工業環境對人體健康的傷害 , 24小時無縫作業 。
工業場景復雜 AGV難交互
然而 , 在工業AGV場景下 , 如何在確保生產效率和安全的前提下 , 保證清潔效果 , 是擺在廠家面前的一道難題 , 由于場景的特殊性 , 自主清潔需要破解三道難關 。
地面類型多樣 , 清潔需求繁多 。 工業場景常見的地面類型有環氧地坪、水泥、金剛砂、大理石、花崗巖、混凝土等;不同材質地面適用不同的清潔模式;清潔需求多樣 , 比如打磨車間要去粉塵 , 煙草制絲車間要掃煙絲 , 食品加工廠要求無塵 , 鋼鐵制造車間要去油污 。
動態物體多 , 機器人定位難 。 工廠里既有設備、儀器、貨架等靜態障礙物 , 又有車間工人、托盤、叉車、AGV等動態障礙物 , 機器人面對復雜多變的環境 , 容易丟失定位 。
難以與AGV交互協作 。 工業環境中 , 常見的AGV有叉車AGV、傳統磁導AGV、自然導航AGV等 。 尤其是無需借助磁條、二維碼等任何外部標識的自然導航AGV , 其自主性強 , 具備實時定位導航、環境感知和路徑規劃能力 , 清潔機器人如何在作業中與各種AGV的動態交互協作 , 考驗著機器人廠家的技術實力 。
清潔機器人在工業AGV場景下的解決方案
解決工業復雜場景下的自主清潔難題 , 清潔機器人需要突破清潔功能和自主導航技術上的雙重障礙 , 以高仙機器人為例 , 看行業領跑者如何為工業AGV場景下的清潔提供解決方案 。
首先 , 高仙機器人擁有完整的產品矩陣 , 具備清掃、洗地、塵推、吸塵、去油污、消毒等多種功能 , 適用工業環境常見的環氧地坪、金剛砂、水磨石、防靜電材質地面等多種地面材質 。 工業場景下廣泛使用的是高仙Scrubber 75、Scrubber 50清潔機器人 。這兩款機器人都具備洗地、塵推、清掃功能 , 針對工業場景污漬沉積滲透、多重油污區的特征 , Scrubber 75特有工業油污清潔模式 , 可去除輪胎印、標識線污漬、油污等 。 其次 , 作為全球最早從事自主移動技術研發和應用的高科技公司之一 , 高仙擁有成熟的SLAM導航技術 , 清潔機器人具備自主建圖定位和導航避障能力 , 自適應復雜多變的環境 。
以避障為例 , 高仙機器人配備激光雷達、深度攝像頭、毫米波雷達、防碰撞等多種傳感器 , 可實現整車360度障礙物檢測 , 通過傳感器來收集深度、高度、距離、圖像等多種數據 。 數據傳輸到機器人內的計算機 , 做出決策 , 并將指令傳遞給動力系統 , 使其做出停止、避讓等動作 。
再次 , 針對AGV交互難的痛點 , 高仙通過與AGV頭部企業強強聯合 , 設計相應的解決方案 。 具體來說 , 通過開放的TCP/IP協議交互 , 將清潔機器人納入AGV調度系統內 , 實現與AGV的交通管制;以心跳報文作為雙方交互在線檢測 , 實現實時交互 , 完成以下多種任務機制:
相關經驗推薦









- 英特爾|Intel公開4nm EUV工藝性能:CPU頻率沖擊6GHz?
- 英特爾|新機:傳蘋果新機支持體溫檢測;小米12 Ultra設計曝光
- 英特爾|數據也需要被“溫柔”對待—三星T7移動固態硬盤Shield版評測
- 英特爾|芯片代工格局洗牌?英特爾即將進入全球前5,超過中芯、華虹
- 客戶端|英特爾將在2022年下半年完成18A設計 未來有望與臺積電比肩
- 英特爾|曾1分鐘賣出2.8億,120w快充+驍龍8 Gen1,終于降價了
- 英特爾|小米筆記本鼠標和觸摸屏不能使用怎么辦
- 英特爾|手機關機拔卡仍能追蹤,但為何沒去中高風險地區,行程卡還帶星?
- 古墓麗影|我國CAD軟件能否能破解卡脖子現狀,順利實現國產化?
- 酷睿處理器|科普貼:關于搭載英特爾12代酷睿處理器的輕薄本