
文章圖片

文章圖片

文章圖片

文章圖片

文章圖片

文章圖片

文章圖片
文章圖片
文章圖片
文章圖片

文章圖片

文章圖片
文章圖片

文章圖片

概述多機器人同步運動也是工業領域常見的一種應用 , 如大體積重型工件的搬運、多焊道對稱焊接等 , 這些應用都需要多臺機器人同步運動來完成 。
在ROBOGUIDE軟件中同樣能夠實現多機器人同步運動虛擬仿真 , 本期就來介紹一下 。
ROBOGUIDE軟件使用版本:V9.40
多機器人虛擬系統創建在ROBOGUIDE軟件中使用工作站創建向導先創建單臺機器人的虛擬系統 , 工藝類型選擇為搬運 , 系統選項中額外勾選“Motion Package(R809)”、“Simultaneous R. Link(J777)”兩個選項 。 其中 , Motion Package(R809)選項是機器人運動功能軟件包;Simultaneous R. Link(J777)選項是機器人同步仿真運動鏈接功能選項包 , 它是實現多機器人同步運動虛擬仿真的必選項 。 其他參數選項均保持默認即可 。
再為工作站添加剩余的機器人 , 點擊“Cell”菜單 , 然后依次點選“Add Robot”→“Single Robot-Serialize Wizard” , 在彈出的虛擬機器人編輯向導對話框中 , 參考上述機器人創建步驟 , 添加相同的機器人 。
重復上述步驟 , 在虛擬仿真環境中一共添加4臺機器人 。
機器人全部添加完成后 , 軟件工作區中多了4臺機器人 , 但是由于機器人位置與姿態是相同的 , 因此它們重合在了一起 。 在左側的Cell Browser中可以看到機器人控制器下出現4臺機器人虛擬控制器 , 它們分別對應已添加的4臺機器人 。
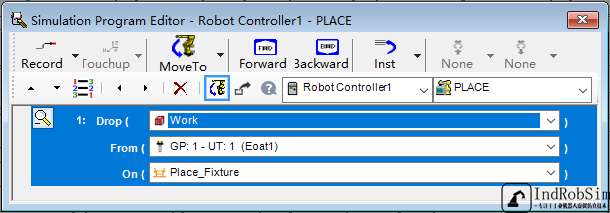
周邊設備模型添加與布局使用ROBOGUIDE軟件自帶的模型創建功能創建一個“Cylinder”類型的模型作為工件 。 再創建出兩個“Box”類型的模型作為簡易工裝 , 其中一個作為抓取工件的工裝 , 另一個作為放置工件的工裝 。 然后將工裝放置到合適位置 , 并將工件安裝到抓取工裝上 。 詳細屬性參數如下:
工件
Name:Work
Scale:Diameter=500mm , Length=10000mm
抓取工裝
相關經驗推薦











- 軟件|幾個有意思又高利潤超低成本的項目
- 軟件|著名媒體對2款頂級旗艦真無線耳機進行了比較,并得出了結論
- 軟件|6款電腦必備的小眾軟件,他們在認真做事
- 軟件|AMD考慮學習Intel和NVIDIA:CPU、顯卡軟件可能收費
- 軟件|小米手機這個功能一定要打開,不然會自動偷偷安裝軟件,越用越卡
- 軟件測試|對于軟件測試行業的·缺點~
- 軟件|【Materials Studio】軟件界面入門第3期
- 軟件|別再說聯發科拍照不行了,這款旗艦拍照性能直接拉滿
- 軟件|不用看美企的臉色了?中科院傳出消息,外媒:開始彎道超車了!
- 軟件|如何選擇適合自己的知識管理系統