|時變失諧也必須應用于微波載波信號
文章圖片
文章圖片
量子糾錯是一個活躍的研究領域 , 然而 , 一般的經驗法則是 , 對于大多數量子糾錯協議 , 低于每個門大約10-4的閾值的控制誤差已經足夠低了 , 并且有些可以容忍每個門大約百分之一的錯誤 。 另一個一般的經驗法則是 , 門錯誤率越大 , 實現量子糾錯協議所需的資源就越多 , 當錯誤率接近閾值時 , 開銷會變得非常麻煩 , 平均控制錯誤率的實際目標是每個門10?4 。 由于控制誤差是許多不同物理誤差機制的集合 , 包括量子比特本身固有的退相干機制 , 因此滿足這一目標意味著每個誤差貢獻應該顯著降低;在這里 , 我們考慮每個控制誤差機制的最大誤差貢獻為10-5的目標 。
讀出誤差通常應處于相似水平 , 盡管某些糾錯碼可以容忍高達百分之一的讀出誤差 。 雖然拉比振蕩描述了量子比特對共振驅動信號幅度的響應 , 但量子比特是一種相干設備 , 就像直接轉換接收器的IQ輸出取決于信號之間的相對相位關系一樣 , 量子位的響應也取決于驅動信號的相位 。
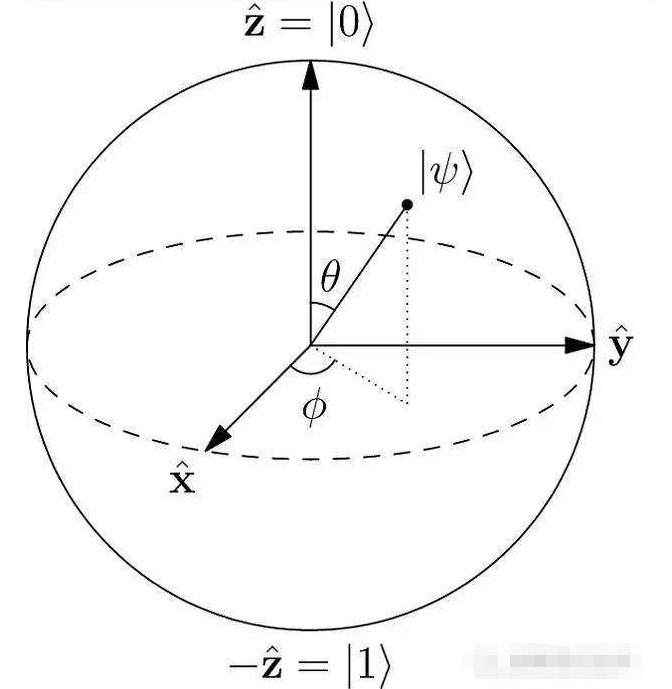
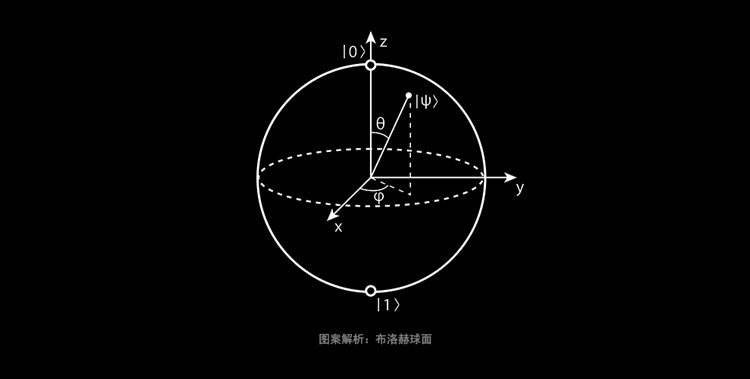
由于量子比特狀態完全由角度θ和φ描述 , 因此可以將其視為終止于單位球體表面的向量 , 該單位球體稱為布洛赫球體 。 在此表示中 , |0和|1狀態映射到北極和南極 , 而所有其他點對應于唯一的疊加狀態 。 在布洛赫球圖中 , 單量子位量子門操作可以被認為是量子位狀態向量的旋轉 。 為了構建一個通用的單量子比特門集 , 我們必須能夠執行關于X、Y和Z軸的量子比特狀態的確定性旋轉 。 單量子比特門操作通常分為兩種類型的門 , XY和Z , 每個通常都有自己的物理實現 。
顧名思義 , XY門產生圍繞布洛赫球體XY平面中的軸的旋轉 。 由于量子位的共振微波激發會在|0和|1狀態之間產生振蕩 , 因此可以使用微波脈沖來調節XY門 。 由于拉比頻率與驅動幅度成正比 , 我們可以簡單地通過控制微波脈沖的積分包絡幅度來將狀態旋轉一個確定的量 。 這可以通過控制包絡幅度和脈沖持續時間來實現 。 旋轉軸由微波載波相位設置 , 因此添加對該自由度的控制允許訪問任意一組XY門 。
【|時變失諧也必須應用于微波載波信號】
此外 , 從ω01失諧驅動會導致旋轉軸傾斜遠離XY平面 , 因此可以將驅動頻率用作額外的自由度 。 在持續時間τg納秒內實現一百八十度旋轉 , 同時將每個誤差機制的影響限制在10?5以下 , 需要控制積分包絡幅度、載波相位和載波頻率偏移以達到分別優于0.25%、0.22?和(2/τg)MHz 。 通常 , 希望盡可能快地執行門操作 , 以限制退相干對實現的門保真度的影響 。 然而 , 控制脈沖的頻譜寬度與脈沖持續時間成反比 , 因此必須正確設計這些脈沖以避免驅動不希望的非諧振躍遷 。 常見的包絡波形包括高斯和升余弦波形 , 與矩形包絡相比 , 它們的頻域旁瓣大大減少 。 這些簡單的包絡足以實現短至約二十納秒的脈沖持續時間 , 但使用transmon量子位達到更短的門持續時間需要進一步的波形優化 。
為了進一步抑制ω12的驅動 , 可以采用通過絕熱門技術去除導數 , 其中通過將正交導數項添加到基帶包絡在ω12處生成陷波 。 雖然這會處理ω12泄漏項 , 但轉向更短的柵極持續時間需要更大的幅度 , 并且由于acStark效應 , ω01的有效值變得依賴于幅度 。 因此 , 時變失諧也必須應用于微波載波信號 。
相關經驗推薦









- 華為|自媒體成就了華為,卻也坑了華為,華為也需要美國芯片
- ssd|我國石墨烯技術有多強?為何美國不惜違反禁令,也要得到這項技術
- 黑莓|同樣都是gtx1080ti,為何不同品牌的價格差距巨大,性能也有差距?
- MIUI13|黑馬也被大幅減持?
- iphone13|iPhone13和紅米Note11照片實拍對比:千元機也有高光時刻
- 蘋果|國產代工巨頭涼了?被蘋果拋棄后3個月虧7000萬,華為也沒法救?
- iOS|爸媽也愛吃瓜!5款iOS神器,過年回家給他們安排上!
- 蘇寧|“蘇寧”實體店會倒,一點也不奇怪
- |為什么很多人寧可買過時iPhone,也不買國產機,內行人道出真相
- 一加科技|一加9RT評測:一款出色的拍照游戲手機,但缺點也很明顯