機器人|RobotStudio軟件:ABB機器人輸送帶跟蹤虛擬仿真操作方法

文章圖片
文章圖片
文章圖片
文章圖片
文章圖片
文章圖片
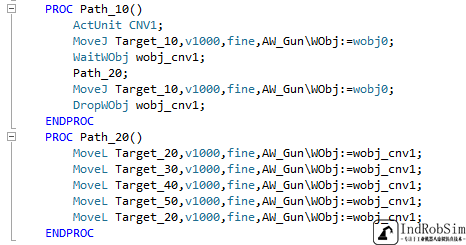
概述?上一期介紹了如何在RobotStudio軟件中創建輸送帶 , 并實現輸送帶自動輸送物料 。 本期將在上一期創建的虛擬仿真環境中添加ABB機器人 , 用來實現機器人對輸送帶上的物料進行跟蹤 , 這一功能也被稱為機器人輸送帶跟蹤 。
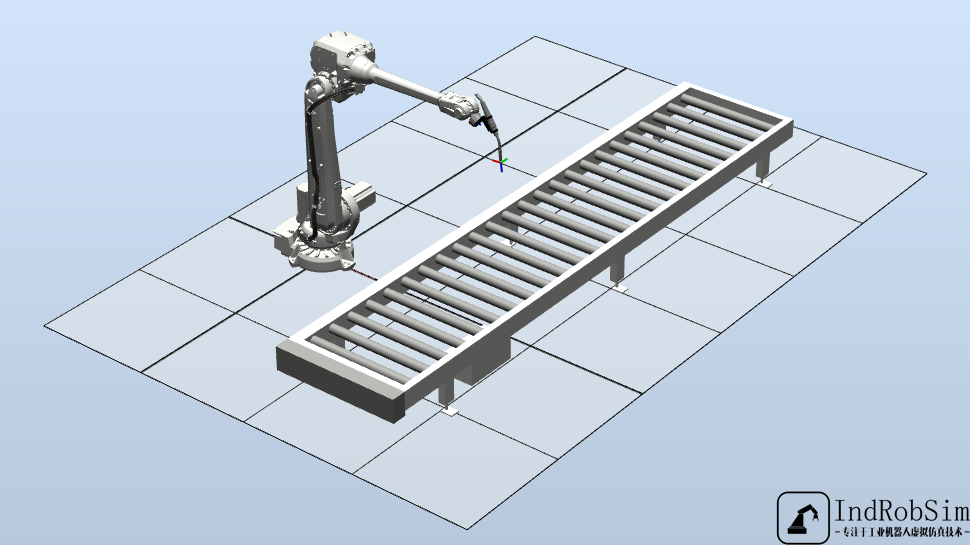
機器人系統創建?從RobotStudio軟件自帶的機器人模型庫中添加一臺機器人 , 然后從軟件設備模型庫中添加工具模型AW_Gun_PSF_25 , 并將工具安裝到機器人上 。
將輸送帶位置調整到機器人可達范圍內 , 使得工件在輸送帶上傳送時機器人能夠在工件上完成加工任務 。
創建好的機器人輸送帶跟蹤簡易工作站如下圖所示 。
從布局生成機器人系統 , 系統選項參數中除了常規的機器人系統語言與I/O信號網絡以外 , 還要選擇輸送帶跟蹤功能選項“606-1 Conveyor Tracking” , 同時系統會要求額外選擇“1552-1 Tracking Unit Interface”或“Conveyor Tracking on PIB” , 任意選擇其中一個選項即可 , 本例選擇“Conveyor Tracking on PIB” 。
【機器人|RobotStudio軟件:ABB機器人輸送帶跟蹤虛擬仿真操作方法】
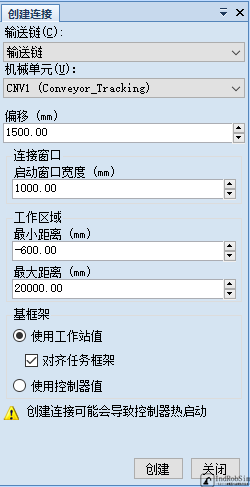
輸送帶配置?在“建模”菜單欄的“機械”命令組中 , 點擊“創建連接”命令按鈕 , 彈出創建連接對話框 。
在此對話框中可以配置機器人控制器與輸送帶之間的跟蹤連接關系 , 各個屬性參數含義如下:
輸送鏈:選擇要連接機器人控制器的輸送鏈 。
機械單元:選擇要連接輸送鏈的機器人控制器 。
偏移:設置輸送帶機械裝置(模型)基準坐標系位置與輸送帶跟蹤基準坐標系位置(連接窗口)的偏移值 , 機器人將在工件運行到輸送帶基準坐標系位置處時開始執行跟蹤任務 。
啟動窗口寬度:設置以輸送帶跟蹤基準坐標系為起始位置沿著輸送帶輸送方向的偏移值 , 這個偏移距離所在位置與輸送帶跟蹤基準坐標系所在位置將形成一個區域(跟蹤窗口) , 機器人將在這個區域內完成輸送帶跟蹤任務 。
工作區域:設置在跟蹤窗口中機器人能夠順利完成工件加工的工作區域 , 通過設置“最小距離”與“最大距離”來控制區域范圍大小 。
基框架:設置輸送帶跟蹤基準坐標系坐標值更新方式 , 包含“使用工作站值”與“使用控制器值”兩種方式 , 在選擇“使用工作站值”時 , 可以選擇“對齊任務框架” , 以使RAPID中的任務坐標系與連接的工作站中的基準坐標系對齊 。
根據需要設置連接參數 , 設置完成后點擊“創建”按鈕 。
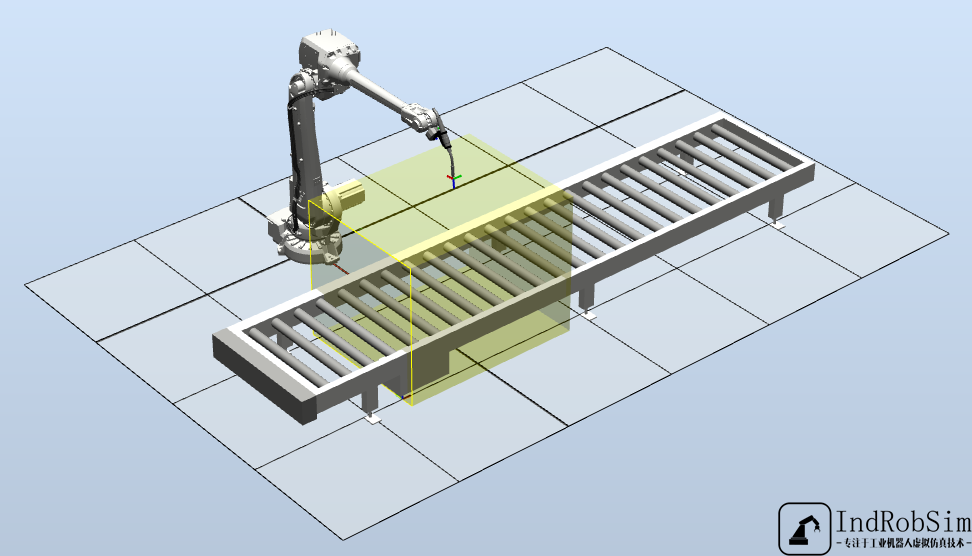
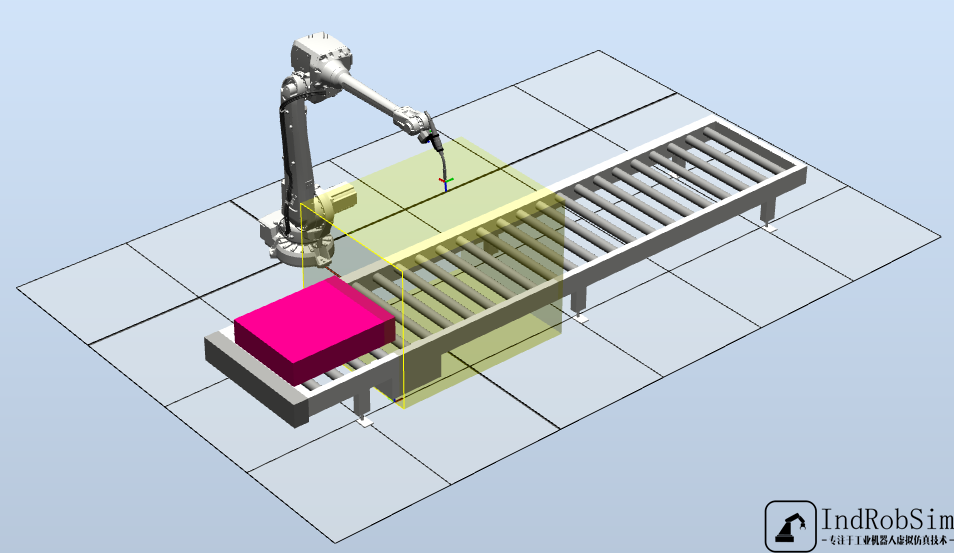
創建機器人控制器與輸送帶跟蹤連接時會對機器人控制器進行熱啟動 , 啟動完成后設置的輸送帶跟蹤參數才會生效 。 這時 , 在軟件工作區的輸送帶上會出現一個淡黃色的長方體 , 這個長方體就是機器人輸送帶的跟蹤窗口 。
相關經驗推薦












- 酷睿處理器|11/12代酷睿+Win11封殺4K藍光碟 播放軟件廠商回應:無能為力
- 軟件|10款職場寶藏APP,讓你的工作效率提升至少10倍
- 軟件|這些相親軟件也很寶藏!
- 機器人|預算緊張補上驍龍8系旗艦,這款2K檔新機擔值得考慮
- 軟件|手機上必備的懸浮窗功能,便捷又貼心,為什么大家都不怎么用?
- 工業機器人|曾嘲笑蘋果的它,最終變成了曾經討厭的模樣,劉海加持
- 機器人|高端制造高歌猛進,中國要在機器人技術領域殺出一條血路!
- 汽車|工信部:2022年對應用商店、第三方軟件開發工具包等實現監管全覆蓋
- 機器人|四軸和六軸機器人的區別是什么,看了就知道!
- 軟件|2021年企業協作行業盤點:打破外延,擁抱生態