
文章圖片

文章圖片
文章圖片
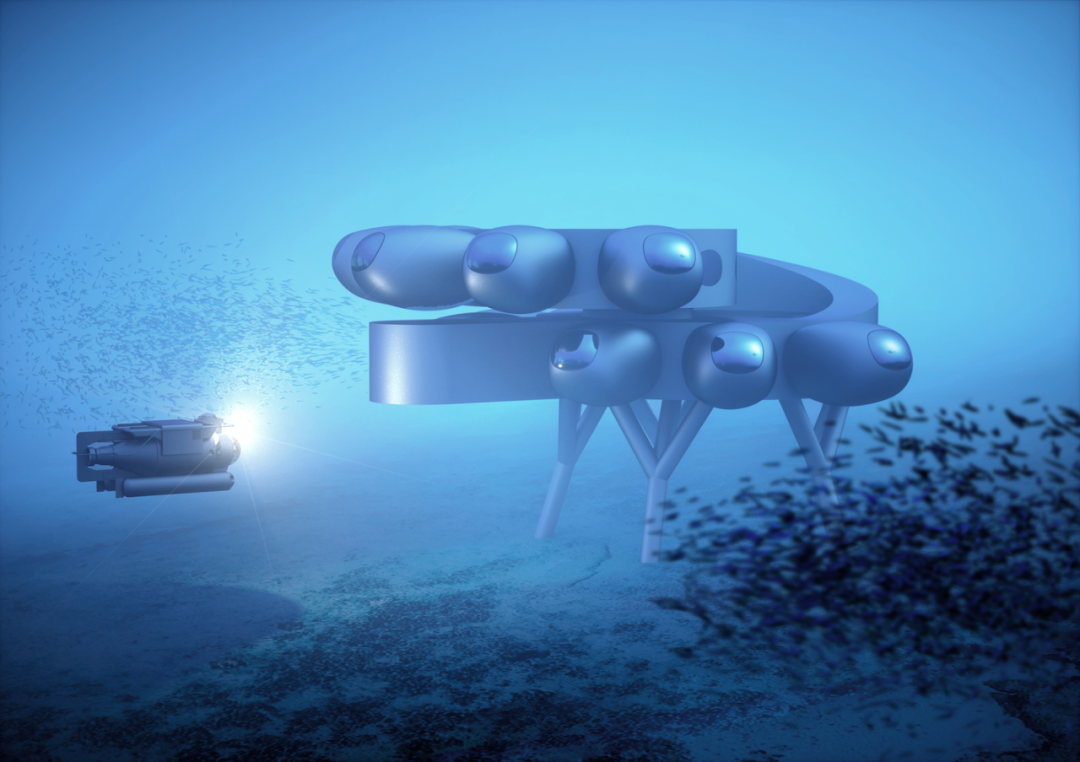
科學家的研究成果為機器人領域的研究做出了貢獻 , 它集成了一個在水下仿生運動、遠程控制的端到端系統 , 并可作為水下生物研究的一個水下觀測器 。 研究人員提出了一種仿生軟機器魚 , 能夠沿著三維軌跡游動 , 自主浮力控制 , 以觀察海洋中的珊瑚礁生物群落 。 更具體地說 , 這項工作的貢獻包括第一個軟機器魚原型機 , 能夠3D可控運動 , 用于水下持續作業 , 自主深度控制通過潛水飛機和基于活塞的微型浮力控制單元 , 采用小型端到端水聲通信系統進行水下遙控 。
在0至18米的深度進行遙控 , 海洋實驗證明了這一點 。科學家開發了機器魚 , 一種完全嵌入式的獨立水下系統 , 它可以獨立游泳 , 并接收人類潛水員的高級命令 。 它以一種循環的方式擺動它柔軟的尾巴來推動自己 , 并調整這種波動來向前游或轉彎 。 尾部運動是由排量泵的循環流動產生的 , 調整泵入尾部兩側的相對液體量就可以產生旋轉運動 。
垂直游泳是通過潛水飛機和BCU實現的 。 這條魚的頂端裝有一個魚眼照相機 , 用來觀察周圍的環境 。 一個聲學換能器也安裝在剛性背鰭的前面 , 傾斜向上 , 接收來自人操作潛水員接口模塊的命令 。液壓系統在低、中和高頻率下執行波動尾驅動 , 以實現一定范圍的游泳速度 。 魚通過調整尾巴的基線偏轉角度來左右轉動 。 魚在每個方向上都有三個水平的偏轉 , 最大基線偏轉約為三十度 。
同樣的 , 這種魚可以在每個方向上三個水平方向傾斜它的潛水飛機 , 最大傾斜度為四十五度 。人類通過一個定制設計的單向聲通信調制解調器遠程控制機器魚 。 該系統由潛水員接口模塊和聲學接收器組成 。 研究人員通過在一個大池中以不同的距離和深度以20比特/s的速率發送一系列200個交替比特來描述通信調制解調器的可靠性 。一名潛水員使用潛水員接口模塊成功地引導機器人通過各種復雜的水下珊瑚礁環境 。
潛水員要求的推力水平 , 尾波頻率 , 深度和轉彎角度;在潛水的過程中 , 潛水員與魚的距離更近 , 因此交流更可靠 。 科學家的分析集中在“穩定”命令上 , 即在1秒內不會立即出現不同命令;例如 , 潛水員在命令從最低音高過渡到最高音高時 , 會反復按“向上”箭頭 , 導致中間音高狀態暫時出現 , 但只有最后的命令狀態才是重要的 。 如果魚在10秒左右的超時時間內沒有收到任何指令 , 它就會回到中性狀態并關閉電機 。
這種暫時的沉默將有助于檢測較弱的命令 。 在珊瑚礁實驗中 , 機器人馬達關閉時在10米范圍內 , 馬達打開時在5米范圍內建立了有效的通信 。 影響通信的最大因素是環境復雜性、魚馬達的噪音和傳輸距離 。 靠近海岸線的其他實驗表明 , 在一個淺層、雜亂的水下環境中 , 即使在電機噪聲存在的情況下 , 該系統也可以進行長達10米的通信 。
【機器人|人類通過一個定制設計的單向聲通信調制器,遠程控制機器魚】這條機器魚有一個機載魚眼相機 , 可以讓遠程操作員拍攝水下探索 。 這種設置減少了潛水員對被拍攝的海洋生物的影響 。 海洋實驗表明 , 機器魚能夠在自然環境中 , 在水流存在的情況下進行三維可控運動 。 在海洋實驗中 , 研究人員也對機器人近距離觀察海洋生物并記錄其反應的能力進行了初步的觀察 。 機器魚沒有模仿任何特定種類的生物魚的意圖 , 除了黑色的鏡頭和聲學換能器外 , 機器魚是白色的 。
相關經驗推薦









- 機器人|機器人的微控制器,通過讀取壓力傳感器來連續記錄深度
- 機器人|ICT的圣杯(二):數字生活的另類想象
- 筆記本|烏克蘭為何能以小博大,已激戰20天:俄烏戰爭成為人類首次AI戰爭
- 機器人|三星每日發布A33等中端機型,搭載Exynos 1280
- 機器人|5G顛覆一切的論調有點言過其實,未來是大數據的時代
- 機器人|對Ai的擔憂,機器人三定律并不完美
- 掃地機器人|掃地機器人哪個牌子好?掃地機器人品牌PK
- 科沃斯|AI語音控制+AI視覺識別:科沃斯真AI掃拖機器人地寶T10 TURBO評測
- |最新成果丨張守祥教授:綜采巡檢機器人關鍵技術研究
- 機器人|為何蘋果手機的使用壽命長?離不開這3項核心優勢