|最新成果丨張守祥教授:綜采巡檢機器人關鍵技術研究

文章圖片

文章圖片
文章圖片
文章圖片
文章圖片
文章圖片
文章圖片
文章圖片
文章圖片
本文創新點
系統闡釋了綜采工作面巡檢機器人的發展現狀 , 分析了綜采工作面應用機器人需要解決的柔性軌道、移動通信無縫漫游、遠程控制和自主操作等卡脖子難題 , 研究用于綜采巡檢機器人的跨式柔性軌道、行走控制、移動通信、移動精確定位、慣性導航、動態圖像采集和控制采煤機調高等關鍵技術 。 提出建立巡檢機器人的感知理論技術裝備體系 , 研究井下機器人動力供應技術 , 建立高性能無縫漫游移動通信系統 , 開發超高清熱成像和毫米波對綜采生產三維實景呈現技術 , 研制集成視覺雷達和煤層探測的超前探測機載裝置 , 進行了工業試驗 , 驗證了巡檢機器人為智能開采所提供的安全、高效技術保障 。
作者簡介
張守祥 教 授張守祥(1964—) , 男 , 山東省濟南市人 , 教授 。 參與國家重點研發計劃4項 , 獲得省科技進步獎1項、國家安全生產科技成果獎1項、省優秀科研成果獎1項 。 發表論文30余篇 , 主編教材1本 , 出版專著2部 , 授權發明專利5項 , 獲計算機軟件著作權1項 。
研究方向
巡檢機器人、無人飛行器、熱紅外檢測、慣性導航、超寬帶檢測和毫米波雷達技術 。
主要成果
從事電子信息工程、嵌入式系統、網絡通信、礦山智能化和飛行動力學等研究和教學工作 , 致力于智能開采的巡檢機器人研制與開發 , 提出智能開采慣性導航、熱紅外成像、超寬帶定位和雷達綜合檢測監控技術 , 設計了綜采工作面軌道和飛行巡檢機器人結構 , 研究煤巖分界檢測和識別技術 , 發表相關論文和完成相應課題研究工作 。
作 者
張守祥1 , 張學亮2 , 張 磊3 , 楊士軍2 , 劉 帥2 , 南柄飛2 , 張代祥4
單 位
1.山東工商學院 信息與電子工程學院;2.北京天瑪智控科技股份有限公司;3.中煤華晉集團有限公司;4.兗礦能源集團股份有限公司 設備管理中心
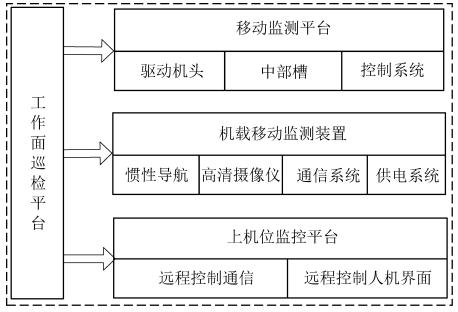
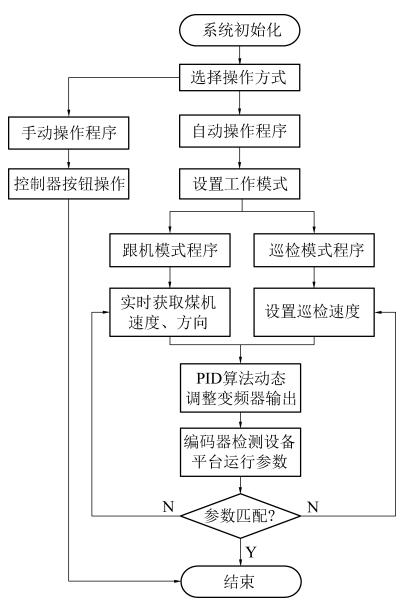
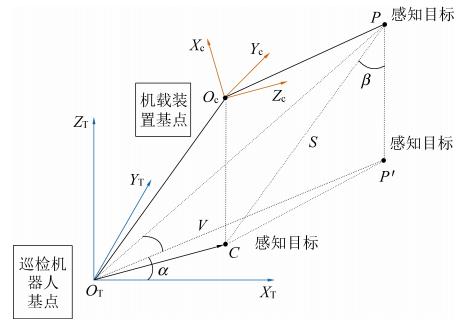
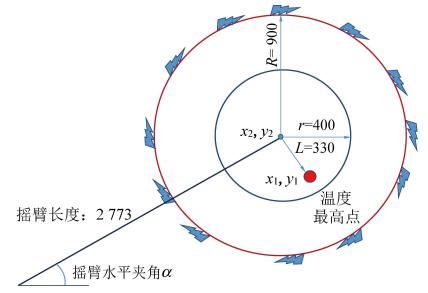
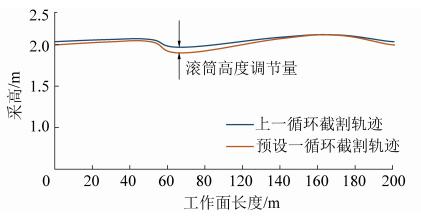
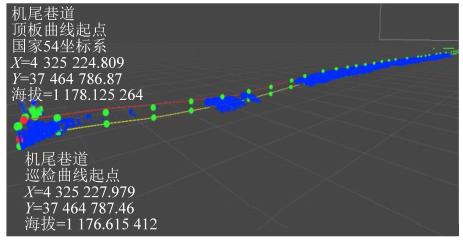
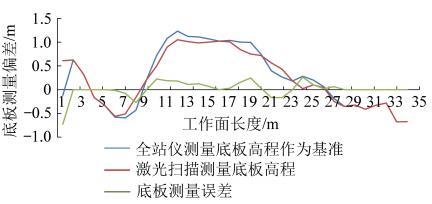
智能化綜采工作面安裝了大量固定傳感器但依然存在監控盲區和監控滯后的問題 。 引入巡檢機器人技術對綜采工作面的全覆蓋和實時監控是智能化開采的必要技術手段 。 從國家宏觀政策和智能開采技術2個層面分析了智能開采對綜采巡檢機器人的迫切需求根據綜采工作面巡檢機器人的發展現狀總結了綜采工作面應用機器人需要解決的柔性軌道、移動通信無縫漫游、遠程控制和自主操作等技術難題 。 通過研究用于綜采巡檢機器人的跨式柔性軌道、行走控制、移動通信、移動精確定位、慣性導航、動態圖像采集和控制采煤機調高等7項關鍵技術提出了建立巡檢機器人的感知理論技術裝備體系、研究井下機器人動力供應技術、建立高性能的無縫漫游移動通信系統、開發超高清熱成像和毫米波對綜采生產時的三維實景呈現技術、研制集成視覺雷達和煤層探測的超前探測機載裝置等5個重點研究方向 。 在薄煤層綜采工作面進行了工業試驗研制的巡檢機器人搭載三維激光雷達和慣性導航系統沿采煤機電纜槽上鋪設的軌道邊行走邊檢測達到了60 m/min的最大巡檢速度實現了雙頻WiFi零切換的無縫漫游高速通信根據機載激光雷達掃描和慣性導航系統建立了綜采工作面三維截割地質模型進行了巡檢模式下的智能割煤工藝試驗工作面直線度檢測和找直偏差不超過150 mm驗證了巡檢機器人能夠為智能開采提供安全、高效的技術保障 。
相關經驗推薦










- 紅米手機|紅米K40認輸!小米最香千元機確定:67W+旗艦芯片,頂配跌破1800
- 第三方支付|最近各地開始陸續升溫了,感覺整個手機又開始發燙了
- 小米科技|降價到千元,曲面屏+3200萬像素自拍,小米最好看手機香不香
- 三星Galaxy|目前最值得買的三款手機,堪稱三大系統代表之作,你更喜歡哪款?
- 工業機器人|DDR5內存怎么裝最劃算?裝機答疑,最具性價比的裝機方案分享
- 小米科技|最美小米手機新款曝光:超窄邊單孔曲面屏+驍龍7系芯
- 小米科技|iPhone14 Pro系列說好的升級沒了,網友:蘋果你最好別這么做!
- ssd|傳夏普VR屏月出貨100萬個,為Quest 2最大顯示屏供應商
- 紅米手機|Redmi史上最貴!K50系列用上三星2K直屏:挑戰頂級直屏
- gen.g戰隊|誰是2022最強旗艦芯,驍龍8gen1和天璣9000,如何抉擇?