2次轉位任務:問天號實驗艙與夢天號實驗艙先后從前向對接口分別轉位至兩個側向停泊口 。
(上述任務均依據任務規劃進行“推測” , 如有雷同 , 純屬巧合)
組合體構型的連續變化 , 使得姿態控制變得更為復雜 , 各艙段間的能源系統、環控系統、信息系統等都需要頻繁調整適應 , 不過得益于天宮空間站優異的融合式設計 , 使得原本耗時耗力的工作可以更為輕松地駕馭 。
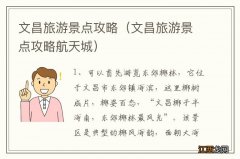
5次交會對接任務中有3次都是無人飛行器來訪對接 , 這就需要航天員在空間站內啟用遙操作手控交會對接功能進行備份 , 此項技術已經在天舟二號任務中加以驗證 。
航天員葉光富在天和一號核心艙內進行天舟二號遙操作對接
在一系列艱巨的任務中 , 問天實驗艙與夢天實驗艙兩個20噸級大型艙段的對接與轉位是神舟十四號飛行乘組承擔的各項工作中的重中之重 , 這將決定天宮空間站的在軌建造成敗 。
除了密集的對接、轉位及組合體控制任務 , 隨著兩個實驗艙的到位還將迎來一系列在軌測試任務 。 首先是問天實驗艙到位后 , 在軌航天員需要調試并啟用該實驗艙所屬的“人員專用氣閘艙” , 此氣閘艙將成為新的“主氣閘艙” , 原有天和一號核心艙氣閘艙將成為“備份氣閘艙” 。
問天實驗艙人員專用氣閘艙出艙口
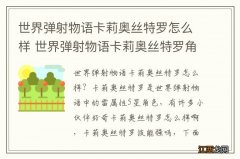
問天實驗艙隨艙上行了一套展開長度為5米的七自由度小型機械臂 , 該臂將與天和核心艙大機械臂進行“級聯組合”測試 , 兩臂結合可以形成展開長度達15米的超長機械臂 , 基于天和機械臂的艙體爬行功能 , 可以實現天宮空間站外表面的全觸達 。
問天艙機械臂與天和艙機械臂級聯組合
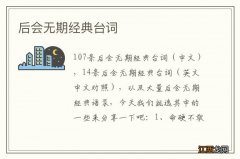
除此之外 , 神舟十四號飛行乘組還將完成問天實驗艙與夢天實驗艙的14個科學研究機柜的解鎖與安裝工作 , 以及多次出艙作業 。 在任務末期 , 他們還將迎來神舟十五號飛行乘組 , 實現我國航天員的首次“太空會師” , 進行5至10天的在軌輪換任務 , 屆時在軌航天員人數將創紀錄地達到6人規模 。
神舟雙船太空會師
“載人為建站 , 建站為應用 。 ” , 這是載人航天工程為之奮斗三十年的目標 , 而這一目標將在神舟十四號飛行乘組手中夢想照進現實 。
在可預見的未來 , 神舟十四號乘組應當說是工作量最大 , 同時也是使命任務最為艱巨的天宮空間站乘組 。
相關經驗推薦












- 平板電腦|平板電腦十多天無人認領,女輔警盯上了保護殼
- 紅米手機|實惠強的很!庫克誠意十足,M1芯片iPadAir5優惠來襲果粉振臂歡呼
- 索尼|六七十元能買到啥?充電+心率+APP同步,云康寶mini體脂秤體驗
- 中興|神舟十三號歸航,中興新機成為新華網報道指定用機,中興回來了
- 雙十一|小米開始發力,一億像素+120W快充,僅售2199元比雙十一還便宜
- ai|網易研究五年的AI技術,應用一次最多能省幾十萬?
- 小米科技|手機性能榜“洗牌”,小米未進前十,第一名卻不被大眾認可
- aito|App膨脹十年:手機“空間殺手”的誕生
- 磁懸浮|神舟13號成功驗證的快速對接、快速返回技術,到底領先美俄多少?
- 主板|天璣9000加持,安排5800mAh強續航,vivoS13Pro亮點十足