文章圖片
文/陳根
由于微型軟體機器人可以主動改變自身的形狀以實現更加靈活的運動和操作 , 因而十分擅長在小尺寸且空間受限的環境中工作 , 這一獨特的優勢將使得他們被廣泛地運用在生物醫學領域 。
其中 , 磁驅動又是目前控制軟體機器人最流行的方法之一 , 因為磁驅動具備可以遠程無線控制、響應快速且易于實現的優勢 。
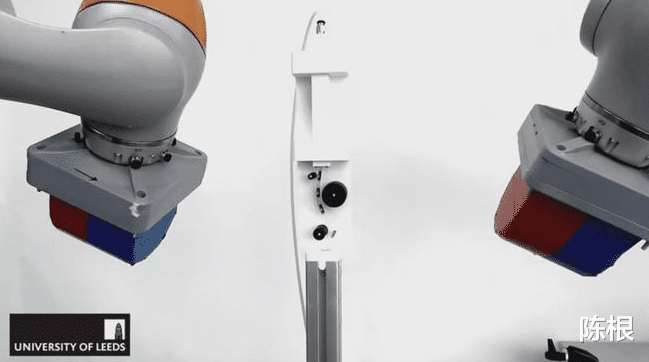
基于此 , 近日 , 利茲大學STORM實驗室的科學家、臨床醫生和工程師組成的研究小組報告 , 他們開發了一種“磁性觸手機器人” , 直徑只有2毫米 , 可由患者體外的磁鐵引導到達肺部最小的支氣管處 。 其中 , 概念的證明是基于實驗室測試 , 包括從解剖數據建模的支氣管樹的3D復制品 。
為了開發機器人系統 , 研究團隊必須克服兩大挑戰 。 首先 , 必須制造一種小巧靈活的設備 , 能夠在支氣管樹的解剖結構中曲折穿行 。 其次 , 需要一個自主系統來引導磁性觸手機器人就位 , 以消除醫生手動操作器械就位的麻煩 , 因為這通常需要患者暴露在X光下 , 而且對醫務人員來說可能在技術上具有挑戰性 。
為了減小機器人的尺寸 , 同時保持運動的可控性 , 研究人員用一系列相互連接的圓柱段制造了它 , 每段直徑2毫米 , 長度約80毫米 。 這些圓柱段是由柔軟的彈性體或橡膠狀材料制成的 , 其中已經注入了微小的磁性顆粒 。
由于磁性顆粒的存在 , 在外部磁場的作用下 , 相互連接的片段可以在某種程度上獨立運動 。 其結果是產生了一種高度靈活的磁性觸手機器人 , 它能夠變形 , 并且足夠小 , 可以避免卡在肺部的解剖結構上 。
負責該研究的Pietro Valdastri教授表示:“一個尺寸為2毫米的磁性觸角機器人或導管 , 其形狀可以通過磁力控制以符合支氣管樹的解剖結構 , 可以到達肺部的大多數區域 , 并將成為調查和治療可能的肺癌和其他肺部疾病的重要臨床工具 。 我們的系統使用了一個自主的磁導系統 , 在進行手術的同時 , 不需要對病人進行X光檢查 。 ”
【機器人|陳根:磁性觸手機器人,為生物醫學應用提供更多可能】現在 , 磁性觸手機器人可以比目前用于探索肺部小支氣管的支氣管鏡和導管或細管過程提供更多的可操作性 , 這也將為診斷和治療帶來更多的便捷 。
相關經驗推薦










- 智能電視|可以自潔不用監督,云鯨J2掃拖一體機器人
- 機器人|抖音、快手“偷食”閑魚、轉轉
- 小米科技|石頭掃拖機器人T8上手體驗!完全解放雙手,吸力集塵全面提升
- 機器人|5分鐘殺滅效率超99% ?太倉企業研發上市新冠病毒過濾消毒機器人
- 機器人|小屏手機我只推薦這3款,“真滿血小屏旗艦”,完美勝任主力機
- 半導體|中日配送機器人產業對比——技術、應用全面領先?
- 掃地機器人|掃地機器人是雞肋?浦瑞克N8Plus深度體驗,能掃能拖能除菌
- 機器人|一些機器人使用軟材料的執行器提高機動性,但這些機器人的推力非常小
- 機器人|機器人鰭模型,允許通過減少的運動學參數空間進行系統探索
- 機器人|盡管已經開發了受魚啟發的機器人,但它們仍無法準確地模仿魚的運動模式