電子皮膚中包括讀取信息的傳感器、用于發送信息的無線發射器 , 以及有助于觸覺反饋的小型振動磁鐵 。
這些傳感器以鋸齒形方式放置的電線組成 , 當貼片彎曲時 , 這些電線被拉得更直 , 彎曲、放直手臂時可以向機器人傳輸有關身體運動的數據 。
研究人員稱 , 這些傳感器可以將人體運動轉換為電信號 , 由MCU進一步處理并通過無線傳輸到目標機器人 。 同時 , 機器人上的壓力傳感器檢測到與外部環境的接觸 , 通過藍牙模塊控制觸覺執行器的振動強度 , 為用戶提供觸覺反饋 。
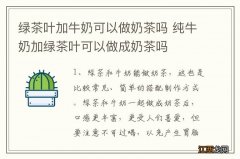
為了進一步說明電子皮膚實時無線操作的性能 , 研究人員測量了1-5米距離范圍內的電子皮膚循環響應速度 , 包括信號傳感、數據傳輸、信號接收、制動響應等環節 。
研究結果表明 , 影響電子皮膚無線傳輸距離的因素有:頂部膚色彈性硅封裝層厚度 , 人體中復雜的生物組織可能吸收電磁輻射等 。
在完善機器人VR的觸覺反饋方面 , 于欣格說:“我們現在可以通過調整電子皮膚的位置和結構解決上述問題 , 同時也會和更專業的通信領域專家合作 , 融合相關技術 , 繼續探索機器人VR在無線通信傳輸領域的潛力 。 ”
▲電子皮膚的無線傳輸距離實驗數據除了藍牙操作模式外 , 電子皮膚還支持Wi-Fi和互聯網兩種無線通信模式 。
對于Wi-Fi模式 , 只要操作區域被同一個Wi-Fi網絡覆蓋 , 無線傳輸范圍就可以擴展到數百米 。 在互聯網操作模式下 , 無線傳輸距離可以擴展至互聯網覆蓋的任何地方 , 其響應時間范圍為30.2到47.8毫秒 。
四、打造線下版元宇宙 , 除了聽、看還能摸除了醫療領域 , 觸覺反饋也可以應用到社交、娛樂、假肢傳感等方面 , 進一步提升用戶體驗 。
如果將VR設備、觸覺反饋和現有的在線視頻軟件相結合 , 從聽覺、視覺延伸到觸覺 , 隔著屏幕 , 用戶就能感受到與遠方親友握手、擁抱的實感 。
去年爆火的“元宇宙”概念中 , 人們需在虛擬世界建立一個自己的虛擬化身 。 而要讓這個虛擬化身與人類感同身受 , 必然離不開觸覺技術的進化 。
早從2018年 , 于欣格就長期專注于觸覺反饋研究 , 探索VR、機器人與電子皮膚的結合 。 此前 , 其團隊研發的皮膚VR進展曾于2019年底發表在國際學術頂刊Nature上 。 皮膚VR系統就搭載了近場通信技術(NFC) , 遠在千里之外的人通過撫摸和滑動屏幕 , 就能無線控制皮膚VR的觸覺驅動 。
在他看來:“機器人VR可以理解為線下版的元宇宙 。 ”
在現實世界中 , 很多危險系數高、環境極端的任務需要機器人輔助 , 這就需要觸覺反饋和傳感一體的閉環人機交互系統 。
于欣格談道 , 在虛擬世界中控制機器人 , 用戶只需要將指令發送給軟件 , 而在現實世界 , 多了指令和硬件的交互環節 , 控制機器人的難度更高 。
機器人VR系統主要針對于人機交互 。 于欣格也補充說 , 從機器人精準感知角度來講 , 他們的研究團隊已經有了相關成果 , 現在電子皮膚中的震動單元大小成功縮小到將近之前的1/4 , 單位面積上單元集成度也大幅提升 。
在娛樂應用方面 , 于欣格為我們舉了一個例子 , 《鐵甲鋼拳》電影中機器人爭斗替代了暴力、血腥的搏擊運動 。 在未來 , 利用機器人VR和皮膚VR控制機器人決斗 , 也是該領域的潛在應用場景 。
▲《鐵甲鋼拳》中人和機器人同步動作片段機器人VR還可以用在健康領域的假肢傳感 。
失去上肢或下肢的特殊人群安裝假肢后 , 往往無法僅通過觀察來掌握力度大小 , 而將電子皮膚安裝在他們的截肢末端有望改善這個問題 。
相關經驗推薦











- 華為|華為再添新鮮血液,“天才少年團”有望打造,前途一片光明
- 吸塵器|逐步將家打造成智能家居,分享下我智能家居的選購使用經驗
- 家庭影院|用萬元打造了一個家庭影院,JBL BAR9.1回音壁體驗:開機那刻,值了
- 芯片|聯想成立芯片公司,這是要給自家電腦打造M1芯片嗎?
- |過年送禮新選擇:華為P50寶盒打造質感超群的藝術單品
- Mac OS|12代英特爾+微星Z690暗黑主板打造MacOS工作站,大小核調試心得分享
- 汽車|耗資4億美元!Meta將采購2000套DGX A100,打造全球最強AI超算
- iPad|蘋果或正打造15英寸版iPad;小米12 Ultra再曝后置為三攝
- 攝像頭|盤點!2022性價比最高的5款手機:時尚簡約,頂級性能,個性打造
- 酷睿處理器|人窮,志不能窮!千元打造性價比之王主機